Solution Description
Item Description
Planetary Gear Stepping Motor :
Precision high-end upgrade with Nema8, Nema 11, Nema14, Nema 17, Nema23, Nema 24
stepper motor low noise, low vibration, firm and durable. Increase torque at low speed.
Reduction ratio:1:3.7 , 1:5.2 , 1:14 , 1:19 ,1:27 ,1:51 , 1:71 ,1:100 ,1:139 , 1:189 ,1:264 , 1:369 ,And 48 hours delivery , in stock .
Application:
Automation control, medical equipment, textile machinery,and packaging machinery fields. Not only in the field of the automation industry, it also has a good use status in the home. Products with low speed and inertia are often seen: electric curtains, electric shutters, etc
Solution Parameters
Planetary Gear Box Specification:
| Housing Substance | Steel |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Perform of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
42HS Hybrid Stepping Motor Specs:
| Model No. | Step Angle | Motor Size(L1) | Rated | Present | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Gear Ratio |
| Voltage | /Section | /Section | /Stage | ||||||||
| Solitary Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.eight | 34 | two.93 | 1.33 | 2.2 | three.five | 270 | four | thirty | .22 | ≤1:369 |
| 42HSC4409 | 1.8 | forty | 2.five | one.five | one.sixty five | 3.3 | 380 | four | 40 | .three | ≤1:369 |
| 42HSC1409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | three.71 | 5.eighteen | 14 | 19 | 27 | fifty one | 71 | one hundred | 139 | 189 | 264 | 369 |
| Complete Height(L1+L2) (mm) | sixty five.5 | 65.5 | seventy six.one | seventy six.one | 76.one | 86.five | 86.5 | 86.5 | 86.five | ninety six.9 | 96.nine | ninety six.nine |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | ten thousand | ten thousand | 10000 | ten thousand | 10000 | 10000 | 10000 |
| Whole Bodyweight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Variety of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Size(L2) (mm) | 31.five | 42.one | 52.five | 62.nine | ||||||||
| Performance | 90% | 81% | 73% | 66% | ||||||||
| 42HSC4409 Planetary Gearbox Requirements: | ||||||||||||
| Reduction ratio | 3.seventy one | 5.18 | fourteen | 19 | 27 | 51 | seventy one | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | seventy one.five | 71.5 | 82.one | 82.one | eighty two.one | ninety two.five | ninety two.five | ninety two.5 | 92.5 | 102.9 | 102.nine | 102.nine |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | ten thousand | ten thousand | ten thousand | 10000 | ten thousand | 10000 | 10000 |
| Overall Bodyweight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Quantity of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Size(L2) (mm) | 31.5 | 42.1 | 52.five | 62.nine | ||||||||
| Performance | 90% | 81% | 73% | 66% | ||||||||
Detailed Photographs
Parameters of Drawing
Company Profile
ZheJiang UMot Technology Co., Ltd. specializes in R&D and sales of stepper motors, servo motors, linear modules and relevant movement control products, customizing and creating high-high quality motor goods for users with specific requirements all around the planet, and supplying general solutions for motion control techniques. Goods are exported to a lot more than thirty countries and locations including the United States, Germany, France, Italy, Russia, and Switzerland. The firm’s major products and method layout have been commonly utilized in automation manage, precision devices, health-related tools, intelligent house, 3D printing and many other fields.
Our organization has been identified as a higher-tech enterprise by related departments, has a total quality administration technique, has received ISO9001, CE, RoHs and other relevant certifications, and holds a variety of electrical patent certificates. “Concentration, Professionalism, Concentration” in the area of automation of motor R&D and technique manage answers is the firm’s organization goal. “Be your most dependable associate” is the company’s service philosophy. We have always been aiming to “make very first-course goods with skilled technology”, maintain speed with the occasions, innovate continuously, and give more end users with far better merchandise and services.
FAQ
1. Shipping and delivery strategy:
1)Intercontinental Express shipping and delivery DHL&FEDEX &UPS&TNT& 7-10days
two)Shipping and delivery by air 7-10 times
3)shipping by sea, shipping and delivery time is dependent on the destination port.
two. Specialized Help:
We can provide you with specialist specialized assistance. And our products good quality promise is 6 months. Also, we take products tailored.
three. Why need to you buy from us, not from other suppliers?
Skilled 1-to-1 motor customized. The world’s massive enterprise of decision for large-good quality suppliers. ISO9001:2008 high quality management method certification, by way of the CE, ROHS certification.
four. How to decide on types?
Just before buying, you should speak to us to verify product No. and specs to avoid any misunderstanding.
5. Are you a factory?
Yes, we are a factory, and we create stepper motor/driver, Servo motor/driver.
| Application: | Automation Control, Medical Equipment, Textile Mac |
|---|---|
| Speed: | Low Speed |
| Number of Stator: | Two-Phase |
| Excitation Mode: | HB-Hybrid |
| Function: | Control, Driving |
| Number of Poles: | 2 |
###
| Samples: |
US$ 42/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Housing Material | Metal |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Play of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
###
| Model No. | Step Angle | Motor Length(L1) | Rated | Current | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Gear Ratio |
| Voltage | /Phase | /Phase | /Phase | ||||||||
| Single Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.8 | 34 | 2.93 | 1.33 | 2.2 | 3.5 | 270 | 4 | 30 | 0.22 | ≤1:369 |
| 42HSC4409 | 1.8 | 40 | 2.5 | 1.5 | 1.65 | 3.3 | 380 | 4 | 40 | 0.3 | ≤1:369 |
###
| 42HSC1409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 65.5 | 65.5 | 76.1 | 76.1 | 76.1 | 86.5 | 86.5 | 86.5 | 86.5 | 96.9 | 96.9 | 96.9 |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
###
| 42HSC4409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 71.5 | 71.5 | 82.1 | 82.1 | 82.1 | 92.5 | 92.5 | 92.5 | 92.5 | 102.9 | 102.9 | 102.9 |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
| Application: | Automation Control, Medical Equipment, Textile Mac |
|---|---|
| Speed: | Low Speed |
| Number of Stator: | Two-Phase |
| Excitation Mode: | HB-Hybrid |
| Function: | Control, Driving |
| Number of Poles: | 2 |
###
| Samples: |
US$ 42/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Housing Material | Metal |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Play of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
###
| Model No. | Step Angle | Motor Length(L1) | Rated | Current | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Gear Ratio |
| Voltage | /Phase | /Phase | /Phase | ||||||||
| Single Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.8 | 34 | 2.93 | 1.33 | 2.2 | 3.5 | 270 | 4 | 30 | 0.22 | ≤1:369 |
| 42HSC4409 | 1.8 | 40 | 2.5 | 1.5 | 1.65 | 3.3 | 380 | 4 | 40 | 0.3 | ≤1:369 |
###
| 42HSC1409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 65.5 | 65.5 | 76.1 | 76.1 | 76.1 | 86.5 | 86.5 | 86.5 | 86.5 | 96.9 | 96.9 | 96.9 |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
###
| 42HSC4409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 71.5 | 71.5 | 82.1 | 82.1 | 82.1 | 92.5 | 92.5 | 92.5 | 92.5 | 102.9 | 102.9 | 102.9 |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
The Basics of a Planetary Motor
A Planetary Motor is a type of gearmotor that uses multiple planetary gears to deliver torque. This system minimizes the chances of failure of individual gears and increases output capacity. Compared to the planetary motor, the spur gear motor is less complex and less expensive. However, a spur gear motor is generally more suitable for applications requiring low torque. This is because each gear is responsible for the entire load, limiting its torque.
Self-centering planetary gears
This self-centering mechanism for a planetary motor is based on a helical arrangement. The helical structure involves a sun-planet, with its crown and slope modified. The gears are mounted on a ring and share the load evenly. The helical arrangement can be either self-centering or self-resonant. This method is suited for both applications.
A helical planetary gear transmission is illustrated in FIG. 1. A helical configuration includes an output shaft 18 and a sun gear 18. The drive shaft extends through an opening in the cover to engage drive pins on the planet carriers. The drive shaft of the planetary gears can be fixed to the helical arrangement or can be removable. The transmission system is symmetrical, allowing the output shaft of the planetary motor to rotate radially in response to the forces acting on the planet gears.
A flexible pin can improve load sharing. This modification may decrease the face load distribution, but increases the (K_Hbeta) parameter. This effect affects the gear rating and life. It is important to understand the effects of flexible pins. It is worth noting that there are several other disadvantages of flexible pins in helical PGSs. The benefits of flexible pins are discussed below.
Using self-centering planetary gears for a helical planetary motor is essential for symmetrical force distribution. These gears ensure the symmetry of force distribution. They can also be used for self-centering applications. Self-centering planetary gears also guarantee the proper force distribution. They are used to drive a planetary motor. The gearhead is made of a ring gear, and the output shaft is supported by two ball bearings. Self-centering planetary gears can handle a high torque input, and can be suited for many applications.
To solve for a planetary gear mechanism, you need to find its pitch curve. The first step is to find the radius of the internal gear ring. A noncircular planetary gear mechanism should be able to satisfy constraints that can be complex and nonlinear. Using a computer, you can solve for these constraints by analyzing the profile of the planetary wheel’s tooth curve.
High torque
Compared to the conventional planetary motors, high-torque planetary motors have a higher output torque and better transmission efficiency. The high-torque planetary motors are designed to withstand large loads and are used in many types of applications, such as medical equipment and miniature consumer electronics. Their compact design makes them suitable for small space-saving applications. In addition, these motors are designed for high-speed operation.
They come with a variety of shaft configurations and have a wide range of price-performance ratios. The FAULHABER planetary gearboxes are made of plastic, resulting in a good price-performance ratio. In addition, plastic input stage gears are used in applications requiring high torques, and steel input stage gears are available for higher speeds. For difficult operating conditions, modified lubrication is available.
Various planetary gear motors are available in different sizes and power levels. Generally, planetary gear motors are made of steel, brass, or plastic, though some use plastic for their gears. Steel-cut gears are the most durable, and are ideal for applications that require a high amount of torque. Similarly, nickel-steel gears are more lubricated and can withstand a high amount of wear.
The output torque of a high-torque planetary gearbox depends on its rated input speed. Industrial-grade high-torque planetary gearboxes are capable of up to 18000 RPM. Their output torque is not higher than 2000 nm. They are also used in machines where a planet is decelerating. Their working temperature ranges between 25 and 100 degrees Celsius. For best results, it is best to choose the right size for the application.
A high-torque planetary gearbox is the most suitable type of high-torque planetary motor. It is important to determine the deceleration ratio before buying one. If there is no product catalog that matches your servo motor, consider buying a close-fitting high-torque planetary gearbox. There are also high-torque planetary gearboxes available for custom-made applications.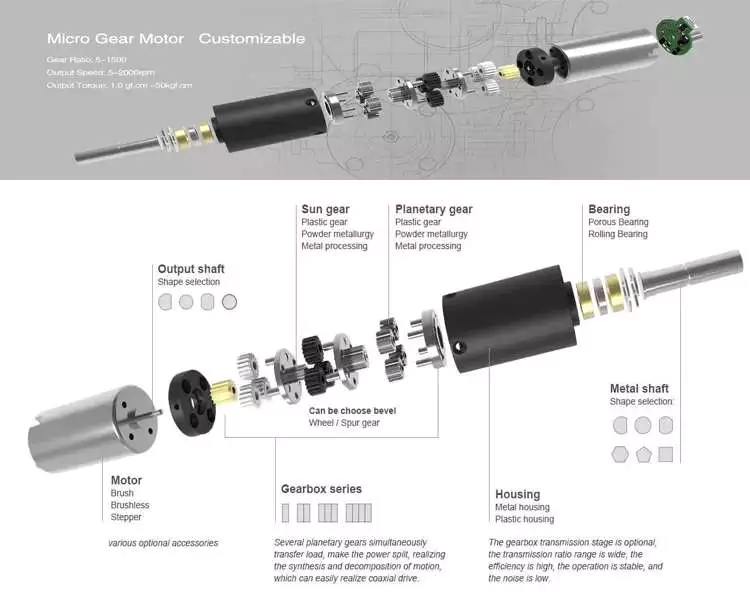
High efficiency
A planetary gearbox is a type of mechanical device that is used for high-torque transmission. This gearbox is made of multiple pairs of gears. Large gears on the output shaft mesh with small gears on the input shaft. The ratio between the big and small gear teeth determines the transmittable torque. High-efficiency planetary gearheads are available for linear motion, axial loads, and sterilizable applications.
The AG2400 high-end gear unit series is ideally matched to Beckhoff’s extensive line of servomotors and gearboxes. Its single-stage and multi-stage transmission ratios are highly flexible and can be matched to different robot types. Its modified lubrication helps it operate in difficult operating conditions. These high-performance gear units are available in a wide range of sizes.
A planetary gear motor can be made of steel, nickel-steel, or brass. In addition to steel, some models use plastic. The planetary gears share work between multiple gears, making it easy to transfer high amounts of power without putting a lot of stress on the gears. The gears in a planetary gear motor are held together by a movable arm. High-efficiency planetary gear motors are more efficient than traditional gearmotors.
While a planetary gear motor can generate torque, it is more efficient and cheaper to produce. The planetary gear system is designed with all gears operating in synchrony, minimizing the chance of a single gear failure. The efficiency of a planetary gearmotor makes it a popular choice for high-torque applications. This type of motor is suitable for many applications, and is less expensive than a standard geared motor.
The planetary gearbox is a combination of a planetary type gearbox and a DC motor. The planetary gearbox is compact, versatile, and efficient, and can be used in a wide range of industrial environments. The planetary gearbox with an HN210 DC motor is used in a 22mm OD, PPH, and ph configuration with voltage operating between 6V and 24V. It is available in many configurations and can be custom-made to meet your application requirements.
High cost
In general, planetary gearmotors are more expensive than other configurations of gearmotors. This is due to the complexity of their design, which involves the use of a central sun gear and a set of planetary gears which mesh with each other. The entire assembly is enclosed in a larger internal tooth gear. However, planetary motors are more effective for higher load requirements. The cost of planetary motors varies depending on the number of gears and the number of planetary gears in the system.
If you want to build a planetary gearbox, you can purchase a gearbox for the motor. These gearboxes are often available with several ratios, and you can use any one to create a custom ratio. The cost of a gearbox depends on how much power you want to move with the gearbox, and how much gear ratio you need. You can even contact your local FRC team to purchase a gearbox for the motor.
Gearboxes play a major role in determining the efficiency of a planetary gearmotor. The output shafts used for this type of motor are usually made of steel or nickel-steel, while those used in planetary gearboxes are made from brass or plastic. The former is the most durable and is best for applications that require high torque. The latter, however, is more absorbent and is better at holding lubricant.
Using a planetary gearbox will allow you to reduce the input power required for the stepper motor. However, this is not without its downsides. A planetary gearbox can also be replaced with a spare part. A planetary gearbox is inexpensive, and its spare parts are inexpensive. A planetary gearbox has low cost compared to a planetary motor. Its advantages make it more desirable in certain applications.
Another advantage of a planetary gear unit is the ability to handle ultra-low speeds. Using a planetary gearbox allows stepper motors to avoid resonance zones, which can cause them to crawl. In addition, the planetary gear unit allows for safe and efficient cleaning. So, whether you’re considering a planetary gear unit for a particular application, these gear units can help you get exactly what you need.


editor by czh 2022-12-22